|
 |
Интегрированные решения автоматизации от компании STEINHOFF Automation- & Fieldbus-Systems
Китайская пословица гласит: лучше один плохой генерал, чем десять хороших. Древняя мудрость актуальна и по сей день - отсутствие централизованного управления и единой концепции порождает хаос и неразбериху, часто сводя на нет всю какую бы то ни было эффективность работы отдельных подсистем, и к системам автоматизации это относится в первую очередь. Когда вопрос построения единого информационного пространства предприятия перешел из области мифов в разряд насущных проблем, оказалось, что проблема эта лишь немногим проще той, с которой столкнулись строители Вавилонской башни, когда вроде и задача ясна, и решение существует, и строители есть, и материалы в наличии, а совместимость предусмотреть почему-то забыли. Казалось бы, достаточно квалифицированного системного интегратора - и вопрос решен?..
Однако, системных интеграторов такого масштаба, специализирующихся на автоматизации всех уровней предприятия и способных покрыть единым готовым решением любой спектр задач, просто не существует в природе - слишком уж разнообразны потребности. В этом ключе все большую актуальность приобретает разговор об открытых системах управления, позволяющих интегрировать между собой решения различных подзадач от различных произодителей. Очевидно, такой подход дает как раз искомую "золотую середину", поскольку найти готовое комплексное решение гораздо сложнее (а зачастую их просто нет), чем собрать его на месте из подходящих "кубиков", что, кстати, можно сделать как прибегнув к помощи системного интегратора, так и силами локального отдела АСУ.
Название статьи - не случайность. Слово "барсук" по-немецки звучит как "dachs". Цель данного материала - рассказать о линейке продуктов DACHS® (Distributed Automation, Control and Host System - "Распределенная вычислительная система автоматизации и управления"), разработанной и поставляемой немецкой компанией STEINHOFF Automation- & Fieldbus-Systems (http://www.steinhoff.de). Эта линейка продуктов содержит программные и аппаратные средства, позволяющие строить открытые распределенные системы управления, пригодные как для АСУТП, так и для других применений, где требуется быстрый цикл опроса, надежность передачи данных и богатые возможности интеграции с верхними уровнями, в том числе в гетерогенных вычислительных средах.
Концепция DACHS
Если говорить в двух словах, концепция DACHS® строится на понятии расширенного виртуального ПЛК (soft-PLC). Целью введения такого понятия было сохранить удобство программирования в стандарте МЭК 61131-3, но обойти свойственные "реальным" ПЛК функциональные ограничения (о том, как это реализуется, речь ниже).
Под "расширенностью" виртуального ПЛК понимаются четыре вещи: расширенные возможности программирования, расширенные возможности коммуникаций, расширенные интерфейсные возможности и расширенные возможности хранения данных; фактически три последних непосредственно вытекают из первой. О каждой из них мы поговорим в нижеследующих параграфах.
Аппаратной базой для виртуальных ПЛК в DACHS® являются PC-совместимые ЭВМ, причем, поскольку благодаря своим расширенным возможностям виртуальные ПЛК в DACHS® могут выполнять самые разнообразные функции, конструктивное исполнение их может быть самым разнообразным. Например, при использовании виртуального ПЛК в качестве низового контроллера в зависимости от требуемой компоновки и разрядности системной шины (8 или 16 бит) это может быть либо PC/104 или microPC (Advantech, Octagon, Fastwel), либо AT96 (Lippert), и т.п.. Конструктив microPC, кстати, интересен большим выбором совместимых друг с другом плат - как процессорных, так и плат расширения - от различных, в том числе и отечественных, производителей. Практически все современные встраиваемые контроллеры оборудованы или подерживают твердотельные диски (в последних моделях чаще всего это накопители семейства DiskOnChip фирмы M-Systems), поддерживаемые многими ОС, что облегчает разрабо тку и обслуживание программного обеспечения.
При использовании виртуального ПЛК в качестве цехового контроллера удобным решением является реализация его на базе промышленной рабочей станции или панельного ПК (богатый выбор таких решений есть у компании Advantech), оборудованных необходимой периферией и одновременно обладающих соответствующими степенями защиты.
Расширенные возможности программирования. Оговоримся сразу, что речь идет не о непосредственном расширении возможностей программирования логики виртуальных ПЛК, а о расширенных возможностях ее дополнения в рамках все того же МЭК 61131-3, причем в основном дело касается языка функциональных блоков.
Классический вариант расширения ПЛК новыми функциями подразумевает написание модулей расширения на C и оформление их в библиотеку функциональных блоков для среды программирования МЭК 61131-3. Разумеется, эти модули должны поддерживаться виртуальной машиной МЭК 61131-3, для этого в нее тоже необходимо внести соответствующие изменения. Как это сделать? Классический, опять же, способ расширения виртуальной машины МЭК 61131-3 заключается в дописывании к ней дополнительного кода на все том же C. Этот метод содержит несколько неприятных подводных камней: во-первых, "распухает" сама целевая задача, а во-вторых, любое изменение кода виртуальной машины несет опасность внесения в него ошибки, а значит, угрожает задачам МЭК 61131-3, выполняющимся под ее управлением. Альтернативным способом расширения виртуальной машины МЭК 61131-3 может служить использование динамических библиотек (DLL); однако, хоть этот подход и позволяет сэкономить на объеме кода виртуальной машины, но безопасности коду не добавляет.
Рис. 1. Расширенный виртуальный ПЛК в DACHS®
Разработчики виртуальной машины МЭК 61131-3 для DACHS® пошли по другому пути (см. Рис. 1). Как виртуальная машина, так и ее модули расширения в виртуальных ПЛК DACHS® оформлены как отдельные процессы в операционной системе; модули расширения можно запускать и выгружать динамически - на объем кода виртуальной машины они не влияют. Мало того, являясь отдельными процессами, они выполняются каждый в своем собственном защищенном адресном пространстве и не могут навредить ни друг другу, ни виртуальной машине. Но и это еще не все. Вариативную (то есть зависящую от конкретного приложения) часть модуля расширения тоже можно изменять динамически - сделано это за счет применения в модулях расширения интерпретатора объектно-ориентированного языка сценариев Python (http://www.python.org, http://sourceforge.net/projects/pyqnx); эта копцепция получила название PyDACHS. Инвариантная часть модуля расширения оформляется как подключаемая библиотека классов Python, вариативная же пишется как сценарий Python, и ее можно в любой момент отредактировать обычным текстовым редактором и импортировать снова - что, кстати, еще и упрощает обслуживание на стадии тестирования.
Почему был выбран именно Python? Можно назвать как минимум пять причин. Во-первых, интерпретация дает гораздо более короткий цикл отладки: результат корректировки исходного текста можно проверить сразу, не прибегая каждый раз к цепочке "компиляция - компоновка - прогон". Во-вторых, объектая ориентация упрощает проектирование, особенно если говорить о сопряжении со средствами программирования МЭК 61131-3: объекты Python - фактически готовые функциональные блоки. В-третьих, код Python компактен: выигрыш по сравнению с C++ может достигать 5-10 раз! В-четвертых, Python очень популярен, хорошо документирован, и для него существует огромный выбор прикладного программного обеспечения в открытом тексте. И, наконец, в-пятых, Python легко расширяем - дополнительные библиотеки классов без труда реализуются на C или C++.
Изменения, которые при этом претерпела сама виртуальная машина МЭК 61131-3, оказались минимальны: в нее просто добавились примитивы межзадачного взаимодействия (IPC - Inter-Process Communication), позволяющие задачам МЭК 61131-3 стандартным способом обращаться к модулям расширения. Таким образом, с точки зрения задач МЭК 61131-3 исполняющую их виртуальную машину можно рассматривать как микроядро с динамически подключаемыми сервисами.
К операционной системе (ОС), под управлением которой должен работать такой виртуальный ПЛК, должны предъявляться достаточно жесткие требования. Во-первых, система управления должна быть предсказуемой - потеря данных в системе управления абсолютно недопустима. Следовательно, применяемая ОС должна являться ОС жесткого реального времени с вытесняющей многозадачностью. Во-вторых, необходимо поддерживать большое количество различного оборудования - коммуникационных адаптеров, плат ввода/вывода, и т.п., ассортимент которого постоянно меняется. Значит, применяемая ОС должна предоставлять простые механизмы интерфейса с оборудованием, чтобы можно было в случае необходимости быстро разработать нужный драйвер. В-третьих, использовать в качестве виртуальных ПЛК ЭВМ с избытком ресурсов было бы слишком накладно. Значит, применяемая ОС должна легко встраиваться в устройства с органиченными ресурсами и поддерживать бездисковые конфигурации. И, наконец, в-четвертых, для обеспечения большей отказоустойчивости необходимо обеспечить безопасность процессов, чтобы они своими действиями не могли навредить как друг другу, так и системе. Это реализуется в ОС, которые предоставляют процессам отдельные защищенные адресные пространства.
Исходя из вышеперечисленных критериев, для реализации виртуального ПЛК в DACHS® была выбрана встраиваемая ОС жесткого реального времени QNX (http://www.qnx.com). Сначала это была QNX4, теперь же в DACHS® применяется и QNX6, что позволило еще больше понизить "порог встраиваемости". Дополнительным преимуществом QNX является еще и то, что QNX обладает встроенной поддержкой прозрачных механизмов сетевого взаимодействия, позволяя объединять узлы QNX-сети в единую логическую совокупность ресурсов и упрощая тем самым построение распределенных систем. Кстати, в ряде отраслей очень популярны SCADA-системы, работающие под управлением QNX, а значит, в таких случаях применение QNX на уровне низовых контроллеров еще и значительно упрощает интеграцию уровней.
Схема программной организации виртуального ПЛК в DACHS® приведена на Рис. 2. В данный пример включены, кроме собственно виртуальной машины МЭК 61131-3, два сервера сетевого взаимодействия (они предоставляют процессам сетевые сервисы) и два соответствующих драйвера сети, а также три модуля расширения на основе интерпретатора Python: подсистема протоколов высокого уровня, графическая подсистема и подсистема БД. Все компоненты общаются друг с другом посредством программной шины QNX IPC - механизма межзадачного взаимодействия QNX на основе обмена сообщениями. Для этого в те из них, которые изначально не поддерживали этот механизм, добавлен модуль QNX IPC - для виртуальной машины МЭК 61131-3 это означало расширение ее собственного программного кода, для интерпретатора же Python этот модуль подключается как внешняя библиотека класов. Казалось бы: без внесения изменений в код виртуальной машины обойтись все-таки не удалось, а значит, где обещанный выигрыш по надежности? Выигрыш по надежности здесь состоит в том, что модуль IPC - единственное и однократное изменение, внесенное в код виртуальной машины. Механизм обмена сообщениями универсален, а значит, будучи однажды реализован, он обеспечивает поддерживающим его задачам доступ сразу ко всем имеющимся сервисам. В случае же "классического" варианта пришлось бы всякий раз дописывать код виртуальной машины с добавлением каждого нового модуля расширения.
Рис. 2. Програмная реализация расширенного виртуального ПЛК в DACHS®
Работают модули расширения предельно просто. Запрашивая определенный сервис, задача МЭК 61131-3 фактически через встроенный в виртуальную машину модуль IPC вызывает соответствующий сценарий Python, который и отрабатывает запрос, обращаясь по мере необходимости к нужному серверу (посредством того же QNX IPC) через подключенную интерфейсную библиотеку. Если возникает необходимость изменить схему отработки того или иного запроса, достаточно внести коррективы в соответствующий сценарий Python, поскольку именно он несет специфичную для приложения смысловую нагрузку. Библиотека интерфейса с сервером и библиотека IPC при этом остаются теми же самыми.
На настоящий момент разработано множество интерфейсных библиотек PyDACHS, позволяющих писать сценарии Python для работы как с серверами БД, так и с графическими и коммуникационными серверами. Подробнее о каждом семействе мы поговорим в соответствующих параграфах.
Расширенные возможности коммуникаций. Одна из слабых сторон ПЛК - их ограниченные способности коммуникаций, как на уровне стыков, так и на уровне протоколов. Возможно, именно это как раз и привело разработчиков к мысли использовать PC-архитектуру в управляющих решениях. Но если до сих пор ситуация была в известной мере паритетной из-за подчинения как "реальных", так и виртуальных ПЛК ограничениям одного и того же стандарта, то теперь наметился явный перелом в пользу решений на основе виртуальных ПЛК, и вот почему.
В этом (2001) году наконец вышел проект стандарта МЭК 61131-5, описывающий средства коммуникаций для ПЛК. И тут встал вопрос: а как реализовывать предусмотренные этим стандартом расширения в среде исполнения МЭК 61131-3? У специалистов компании STEINHOFF Automation- & Fieldbus-Systems ответ был готов - см. предыдущий параграф - что позволило им без труда за короткий срок реализовать дополнительный модуль расширения, обеспечивающий поддержку самых разнообразных механизмов коммуникации.
Виртуальные ПЛК в DACHS® поддерживают большой выбор стыков и протоколов, включая протоколы высокого уровня из области Интернет-технологий, что обеспечивает этим контроллерам высокий уровень совместимости. В частности, для сопряжения с устройствами полевого уровня поддерживаются разнообразные полевые шины (PROFIBUS, CAN, LON, ASI, INTERBUS), сопряжение же с верхними уровнями возможно практически по любому стыку с использованием как QNX-сети, так и TCP/IP, в том числе и со всеми вытекающими протоколами высокого уровня (FTP, HTTP, ODBC, SNMP и т. п.) - работа с соответствующими серверами поддерживается посредством PyDACHS. Кстати, применение QNX-сети для связи с вышележащим уровнем (это становится возможным, когда этот уровень сам реализован на QNX - например, там используется QNX-ориентированная SCADA-система) позволяет существенно снизить стоимость системы, поскольку в QNX поддержка сети является встроенной, и не нужно тратить дополнительные средства на приобретение среды исполнения необходимого для связи с ПЛК протокола.
Также возможна интеграция виртуальных ПЛК DACHS® со SCADA-системами, работающими под управлением Windows, посредством OPC-сервера, поставляемого в комплекте со средой программирования МЭК 61131-3.
Коммуникационное аппаратное обеспечение, поддерживаемое в DACHS®, насчитывает десятки производителей, в число которых входят Allen Bradley, Comsy, Echelon, Engenuity Systems, Inova Computers, PEP, Phoenix Contact, Siemens, Softing, SST, TMG i-tec, VISTA Electronics и многие другие.
Открытые стандарты коммуникаций позволяют использовать в решениях на базе DACHS® полевые станции распределенного ввода/вывода от самых различных производителей (Siemens, Entrelec-Schiele, и т.д.), но особого внимания здесь заслуживает модульная система распреденного ввода/вывода Wago I/O фирмы Wago. В ней для передачи данных могут использоваться до семи различных вариантов полевых шин, причем для перехода с одной полевой шины на другую достаточно просто заменить соответствующий интерфейсный модуль в узле системы, конфигурация модулей ввода/вывода останется прежней. Полезная хитрость использования такой системы в DACHS® заключается в том, что с точки зрения задачи 61131-3 все системы ввода/вывода одинаковы, поскольку сервисы, предоставляемые виртуальной машине сетевым сервером (в данном случае - сервером полевой шины), унифицированы и от типа применяемой сети не зависят. Таким образом, если будет необходимо перейти на другую полевую шину (например, система была изначально разработана для CAN, а потом понадобилось добавить поддержку Profibus-DP), достаточно будет сменить интерфейсный модуль полевой шины в станции Wago I/O, поставить в виртуальный ПЛК другую плату расширения и запустить соответствующий драйвер. Ни система ввода/вывода, ни задача МЭК 61131-3 при этом ни в какой модернизации нуждаться не будут.
Расширенные интерфейсные возможности. Нужен или нет виртуальному ПЛК графический интерфейс пользователя - вопрос спорный. В первую очередь это зависит от того, где и в какой роли будет применяться этот виртуальный ПЛК. С другой стороны, коль скоро виртуальные ПЛК часто применяются там, где интерфейс пользователя нужен - хотя бы в тех же цеховых контроллерах - предусмотреть такую возможность следует. Специалисты STEINHOFF Automation- & Fieldbus-Systems учли и этот момент.
Модуль расширения, реализующий графическую подсистему виртуального ПЛК в DACHS®, также реализован при помощи PyDACHS. Роль графического сервера при этом выполняет кросс-платформенный графический сервер Tilcon, продукт канадской компании Tilcon Software (http://www.tilcon.com).
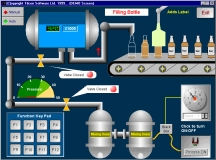
Рис. 3. Пример графического интерфейса, реализованного с помощью Tilcon
Сервер Tilcon существует на ряде платформ (QNX4/6, RTX, Windows, планируются версии для Linux и VxWorks) и предоставляет богатый выбор графических примитивов, позволяя реализовывать самые разнообразные объекты, включая сложные области анимации. Еще одной отличительной особенностью Tilcon является наличие встроенного TCP/IP-сервера, позволяющего реализовывать технологию удаленного пользовательского интерфейса в гетерогенных сетях. Иными словами, оборудованный такой графической подсистемой виртуальный ПЛК может иметь не только локальный, но и распределенный по сети графический интерфейс, причем отображение и взаимодействие с оператором может вестись на удаленной рабочей станции под управлением любой из поддерживаемых ОС. Это предоставляет дополнительные возможности интеграции.
Приложения на основе Tilcon широко используются в медицинских, индустриальных, военных и многих других приложениях. Более подробно об этом можно прочитать на веб-сайте компании Tilcon Software (http://www.tilcon.com/customer2.html, http://www.tilcon.com/customer3.html). Более подробную информацию об использовании сервера Tilcon в DACHS® можно найти на веб-сайте компании STEINHOFF Automation- & Fieldbus-Systems (http://www.steinhoff.de/gui.htm, http://www.steinhoff.de/PyDACHS_python-tilcon.htm). Пример интерфейса примитивного цехового контроллера, реализованный при помощи графического сервера Tilcon, приведен на Рис. 3.
Расширенные возможности хранения данных. Еще одно семейство модулей расширения PyDACHS дополняет виртуальные ПЛК в DACHS® способностью работать с данными при помощи СУБД. Подчеркнем особо: не складывать данные в БД, расположенную на верхнем уровне, а именно обеспечивать возможность локального хранения данных. И важно это не только из-за того, что когда данных становится много, встает вопрос автоматизации их обработки. Недостаток СУБД-приложений, поддерживаемых применяемыми на нижних уровнях встраиваемыми ОС реального времени, привел к тому, что традиционным решением стало использование СУБД только на верхних уровнях. Это, в свою очередь, несколько изменило схему информационного обмена между уровнями: расположенный на нижнем уровне источник данных вместо сервера стал клиентом, взяв на себя всю инициативу по отбору данных, необходимых "верхам", и их передаче "наверх". Как-то непохоже на здравый смысл. Применение же СУБД на нижних уровнях позволяет не только облегчить жизнь программистам, но и восстановить естественный порядок вещей. Простым примером может служить цеховой контроллер на базе виртуального ПЛК с подсистемой БД, в которой используется ODBC-совместимый сервер - похожая схема изображена на Рис. 4.
На текущий момент библиотеками PyDACHS поддерживаются такие СУБД как Berkeley DB (http://www.sleepycat.com) и GDBM. Планируется также поддержка встраиваемой реляционной СУБД Empress от канадской компании Empress Software (http://www.empress.com), существующей в версиях для множества платформ, включая QNX4 и QNX6, и очень хорошо зарекомендовавшей себя в различных отраслях индустрии (подробнее см. http://www.empress.com/marketing/sucess-stories.html). Последняя, кстати, кроме отличных скоростных характеристик, обладает еще и своими богатыми возможностями интеграции при помощи ODBC и JDBC, а разработанный недавно модуль Empress DB Pipe (http://www.empress.com/partners/dbpipe.html) позволяет фактически реализовать репликацию базы данных Empress в базу данных Microsoft SQL Server.
Что из этого следует?
Использование открытых стандартов при построении системы автоматизации позволяет смотреть на несколько шагов вперед и решать проблемы интеграции еще до их реального возникновения. Самые удачные в "локальном" смысле закрытые решения автоматизации часто не учитывают перспектив интеграции с пограничными областями, что приводит к буквально анекдотическим случаям. В частности, известен пример, когда связующим звеном между подсистемами АСУТП и АСУП являлся оператор, считывавший данные с экрана цехового контроллера и вручную заносивший их в корпоративную базу данных. Смех, да и только.
Заложенная в DACHS® открытая модульная концепция позволяет набирать систему автоматизации - как ее аппаратную, так и программную стороны - по частям, используя только те "кирпичики", которые действительно необходимы, и связывая их между собой так, как этого требуют установленные ограничения. Один из возможных вариантов конфигурации системы управления на базе DACHS® приведен на уже упомянутом Рис. 4.
Рис. 4. Пример конфигурации системы на базе DACHS®
В данной конфигурации используются интеллектуальные устройства полевого уровня, подключенные к виртуальным ПЛК (здесь они выступают в роли низовых контроллеров) при помощи полевой шины; низовые контроллеры объединены с цеховым контроллером по сегменту полевой шины или Ethernet.
Обратите особое внимание на роль цехового контроллера: кроме выполнения своих основных задач, он служит как бы информационным шлюзом между подсистемой АСУТП и сетью предприятия. Это как раз один из способов избежать "вавилонской башни" между информационными подсистемами, когда у каждой существуют определенные традиции хранения и обработки информации (и, разумеется, разные, поскольку сам характер информации в них отличается), а необходимость сопряжения очевидна. В нашем примере проблема решается путем применения в цеховом контроллере технологической СУБД с открытым протоколом доступа к данным, "понятным" как для контроллеров нижних уровней, записывающим данные в архив, так и для ЭВМ сети предприятия, использующих эти данные на верхних уровнях.
Где зарыт барсук?
Специфика встраиваемых систем заключается в том, что чем лучше они работают, тем меньше приходится вспоминать, что у них внутри. Тем сложнее бывает жизнь у отдела маркетинга: гораздо сложнее убеждать потенциальных клиентов в эффективности решений, которые никогда не находятся на виду.
Так где же зарыт барсук? Решения на базе DACHS® широко используются по всему миру в самых разнообразных отраслях (промышленная автоматизация, транспорт, энергетика, робототехника, почтовые системы, медицинская техника, автоматизация зданий, и т.д.). Под управлением DACHS® работают системы управления дизельными генераторами электропитания на наземных станциях Европейского космического агентства Коуроу и Курина (описание можно найти по адресу http://www.steinhoff.de/ppp_oc-conf_fi/ppframe.htm), нефтяные платформы компании Thule RigTech, расположенные в Шотландии, Норвегии, Франции и Сингапуре (DACHS® там используется в связке с QNX-ориентированным SCADA-пакетом Sitex от Jade Software), метрополитен в Бухаресте (разработка компании Real Time Group S.A.) и многие другие системы, включая автоматизированные автостоянки в Корее и системы заправки самолетов в германских аэропортах. В числе клиентов STEINHOFF Automation- & Fieldbus-Systems, использующих решения DACHS®, значатся такие крупнейшие компании как BOSCH, Motorola, IBM, LUCENT и многие другие, а также многочисленные образовательные учреждения.
В нашей стране сейчас активно начинаются внедрения комплексных решений на базе DACHS® в нефтегазовой и металлургической отраслях; отдельные подмножества DACHS® - в частности, подсистемы полевых шин - также используются в транспортных и военных приложениях. Будем надеяться, что заложенные в DACHS® принципы совместимости помогут российским инженерам строить красивые, функциональные и надежные системы управления и не задумываться на каждом шаге о возможных проблемах интеграции решений между собой.
Николай Горбунов
[email protected]
www.swd.ru |
|