Мобильный телеметрический комплекс
Одним из основных направлений деятельности Особого конструкторского бюро Московского Энергетического института (ОКБ МЭИ) на протяжении всей 60-летней истории является разработка бортовых и наземных телеметрических систем.
После победы в тендере, организованном Российским космическим агентством (РКА), в ОКБ МЭИ была создана наземная станция МПРС для приема телеметрической информации. Конструктивно станция в зависимости от комплектации состоит из 2 6 блоков 19 дюймовой ширины. Столь малые габариты и вес позволяют оперативно развертывать аппаратуру в существующих приемных пунктах.
Одновременно со станцией разработана антенная система МАС-3 с диаметром зеркала 3 метра (рис.1). Антенна выполнена разборной и максимально облегченной. Связка МПРС и МАС-3 дает возможность за несколько часов организовать пункт приема телеметрии в любой точке, в том числе и на необорудованной площадке.
Созданию системы управления МАС-3 и посвящена данная статья.

Рис. 1. Антенна МАС-3
Состав оборудования и технические требования
Антенна имеет две оси вращения – азимутальную и угломестную, с диапазоном углов 270..270 и 0..180 соответственно. На осях установлены мотор-редукторы и угловые датчики. Двигателями управляют контроллеры серии MicroMaster производства фирмы Siemens. Команды на контроллеры подаются по последовательному порту. Данные с угловых датчиков снимаются через специальную плату на шине PCI. Для определения координат точки стояния и установки точного времени используется приемник GPS. Кроме того, в состав могут быть введены дополнительные платы ввода вывода, в том числе и собственного производства.
Упрощенная модель системы показана на рис.2.
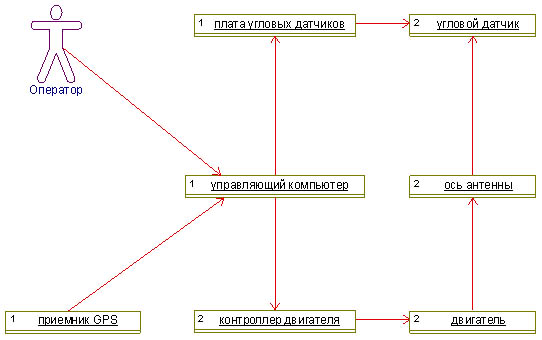
Рис.2. Упрощенная модель системы управления МАС-3
Особенностью технических требований была высокая максимальная скорость при движении по заданной траектории (до 20 угл. град./с), причем точность сопровождения не должна превышать 1 угл. град. Такие скорости возникают при стартах ракет или при близком пролете воздушных объектов.
Управляющий регулятор реализован программно и является дискретным. Требования к регулятору достаточно жесткие – период не более 50 мс, стабильность периода не хуже 10%.
Интерфейс оператора должен быть графическим, система должна иметь возможность управляться дистанционно.
Выбор ОС
С одной стороны, разрабатываемая система не является встраиваемой. Период управления 50 мс достаточно длителен, графический интерфейс и развитые сетевые возможности вполне могут быть реализованы с помощью ОС общего назначения.
Но, с другой стороны, приняв во внимание желательность уменьшения периода управления, жесткие требования к его стабильности, а также необходимость написания драйверов к специальным платам, становится очевидным применение специальной ОС реального времени.
В результате была выбрана ОС QNX6.
Она полностью удовлетворяет всем предъявляемым требованиям. Немаловажным фактором является то, что QNX много лет используется в ОКБ МЭИ и неоднократно подтверждал свои высокие характеристики.
Успешное решение данной задачи убедило в правильности выбора. Период управления удалось снизить до 15 мс. И это не предел.
Реализация программного комплекса
После анализа требований система была разбита на две подсистемы – интерфейс оператора и собственно подсистему управления. В подсистеме управления были выделены классы, как показано на рис.3.
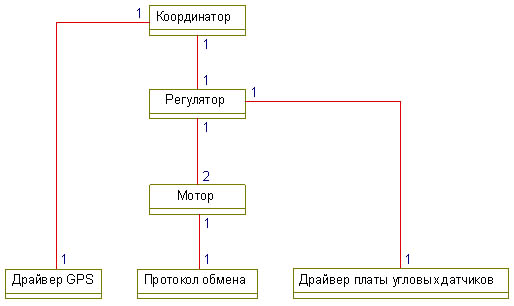
Рис.3. Диаграмма классов подсистемы управления
Каждый класс подсистемы управления является активным и оформлен, как администратор ресурсов. За основу был взят шаблон, размещенный по адресу resmgr.narod.ru
Главным принципом архитектуры QNX является механизм обмена сообщениями Send-Receive-Reply (SRR) и модульность. Успешная реализация самой ОС весьма располагает к применению подобной архитектуры и для решения прикладных задач, хотя, конечно, это не единственно возможный вариант.
При использовании SRR и администратора ресурсов процесс реализации классов является примитивным. Для каждой команды создается связка «имя команды» и соответствующая структура данных. Полученная пара подставляется для использования при вызове devctl().
Для удобства можно сделать обертку над вызовом devctl() в виде функции, или создать интерфейсный класс. В последнем случае термин «послать сообщение классу» приобретает буквальный смысл.
Управление по обеим осям производится одинаково. Некоторые программы запускаются дважды, но регистрируют разные имена, задаваемые через параметр. Например, /dev/mas3/motor_az и /dev/mas3/motor_el. Такой простейший прием дает два независимых, но одинаковых процесса, различение которых не составляет труда.
Результаты
Система разработана, отлажена, настроена. Все необходимые испытания успешно пройдены. Высокие характеристики комплекса обусловили спрос, превосходящий первоначальные ожидания. Система демонстрировалась на российских и международных выставках. Развернутая на позиции система показана на рис. 4.

Рис.4. Развернутый в полевых условиях мобильный пункт приема телеметрической информации. Справа антенна МАС-3. В салоне автомобиля: слева станция МПРС, справа компьютер управления антенной. На переднем плане корпуса для упаковки антенны.
Есть интересные предложения по развитию. Дополнительные возможности могут быть реализованы за счет усовершенствования системы управления, имеющей большие резервы. Это во многом достигнуто за счет применения QNX.
Дополнение
При разработке использовалась свободно распространяемая версия Modeler Edition программы Rhapsody фирмы Telelogic (www.telelogic.com). Приводимые диаграммы построены с помощью этого инструментального средства. Поставлен вопрос о приобретении полной версии, имеющей очень широкие возможности.
Желтиков И.А.
С.н.с., ОКБ МЭИ, [email protected]
|
