| МГТУ им. Баумана, 2005
Дисциплина: "Современные проблемы проектирования электронных устройств гидропневмосистем".
Целью изучения данной дисциплины является ознакомление студентов кафедры Э-10 с современными вопросами проектирования и практического применения электронных устройств гидропневмосистем.
Лектор: Семёнов Станислав Евгеньевич, к.т.н., доцент кафедры Э-10.
Лаборант: Водолажский Василий Васильевич, аспирант кафедры Э-10.
Краткое описание учебного курса в части применения ОСРВ QNX.
Лекции
1. Устройства ввода-вывода и преобразования электрических сигналов. Применение устройств согласования в ГПС. Использование сетевых технологий для управления ГПС.
2. Общие сведения об операционных системах реального времени, средах и языках программирования.
3. Варианты построения программ управления ГПС. Примеры приложений реального времени для ОС РВ.
4. Примеры построения аппаратуры и ПО типовых ГПС.
Лабораторные работы
1. Демонстрация цифровых устройств кодирования и передачи информации.
2. Изучение микропроцессорной системы управления ГПС; общая шина, устройства ввода вывода и преобразования электрических сигналов.
3. Демонстрация работы ГПС под управлением компьютера.
4. Разработка и отладка управляющей программы под ОС РВ.
Лекции
В лекции 1 студенты ознакамливаются с устройствами ввода-вывода и преобразования электрических сигналов (ЦАП/АЦП). Приводятся примеры применения устройств согласования в гидропневмосистемах. А так же рассказывается о использовании сетевых технологий для управления гидропневмосистемами (технология разделения на ЭВМ верхнего и нижнего уровня). Лекция служит теоретической основой для лабораторных работ №1 и №2.
В лекции 2 студенты получают общие сведения об операционных системах реального времени, средах и языках программирования. В качестве примеров ОСРВ приводятся VxWorks, Windows CE.NET, QNX. Лекция в основном строится на материалах статьи "Операционные системы реального времени" книги "Практика работы с QNX" Москва, Издательский Дом "КомБук" 2004. Учитывая, что в дальнейшем основное внимание уделяется применению ОСРВ QNX в качестве языка программирования описывается С/С++, а в качестве сред программирования – Photon AB и IDE. Для подготовки к лекции 3 и лабораторных работ №3 и №4 студентам выдаётся для ознакомления статья Олега Цирюлика "Построение приложений в PhAB" книги "Практика работы с QNX" Москва, Издательский Дом "КомБук" 2004 (статья также доступна на сайте qnx.org.ru).
В лекции 3 студенты ознакамливаются с примерами построения приложений реального времени. В качестве примеров приводятся программы Input reader (считывание данных с АЦП и вывод результатов в текстовом виде на экран), Sliders (считывание данных со слайдеров вывод информации в графическом виде), Time meter (программный "секундомер", с выводом на экран времени выполнения различных участков кода). Данные программы являются "кирпичиками" для построения управляющей программы (лабораторная работа №4).
В лекции 4 приводятся примеры построения аппаратуры и ПО типовых ГПС. Лекция является практическим обобщением предыдущих.
Лабораторные работы
Лабораторные работы №1 и №2 служат для практического ознакомления студентов с устройствами ввода-вывода и преобразования электрических сигналов (ЦАП/АЦП). В качестве лабораторного образца используется 12-ти разрядный ЦАП/АЦП – плата cio-das08/jr-ao фирмы “Measurement computing”. Из-за недостаточности мощности сигнала для непосредственного управления возникает необходимость использования дополнительного электрического усилителя мощности. Лабораторные работы служат для практического закрепления материалов лекции 1.
Лабораторная работа №3 носит демонстрационный характер. На данной лабораторной работе студентам демонстрируется работа ГПС под управлением компьютера в различных режимах (ручное управление, автоматическое, отработка заданной последовательности действий и т.п.).
Лабораторная работа №4 служит для практического закрепления полученных знаний и создания первичных навыков практического написания программ в PhAB.
Программа Input reader
Внешний вид окна программы представлен на рис. 1.
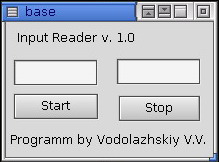
рис. 1 |
В данной программе используются следующие виджеты: PtTimer, 2 PtButton и 2 PtText.
В таймере происходит циклическое считывание данных с АЦП и вывод данных на экран. Активация вывода осуществляется нажатием кнопки "Start". Для прекращения вывода данных необходимо нажать "Stop".
Примерное время написания – 10…15 минут.
Программа Sliders
Внешний вид окна программы представлен на рис. 2.
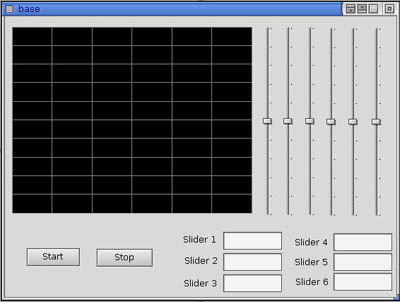
рис. 2 |
В данной программе используются следующие виджеты: PtTimer, 2 PtButton, 6 PtText, 6 PtSlider, PtTrend, PtGrid.
Данные считываются со слайдеров и выводятся в соответствующие "оконца". После нажатия кнопки "Start" данные выводятся и в виде графиков. Для прекращения графического вывода данных необходимо нажать "Stop". Реализована возможность вывода 6 графиков.
Программа служит для усвоения навыков графического вывода данных на экран.
Программа Time meter
Внешний вид окна программы представлен на рис. 3.
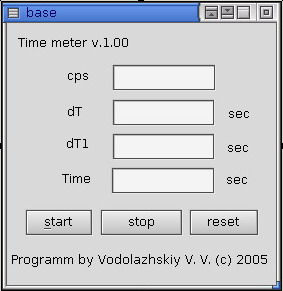
рис. 3 |
В данной программе используются следующие виджеты: PtTimer, 3 PtButton и 4 PtText.
Программа реализует "секундомер", с выводом на экран времени выполнения различных участков кода с высокой точностью.
Программа обучает методу измерения выполнения различных участков кода, и хрониметрированию процессов.
После написания данных программ в качестве задания студенты должны написать небольшую программу для ручного управления гидроприводом.
Дополнение к лабораторной работе №3.
Для применения в лабораторной работе создаётся программа, Experiment.
Внешний вид окна программы представлен на рис. 4.
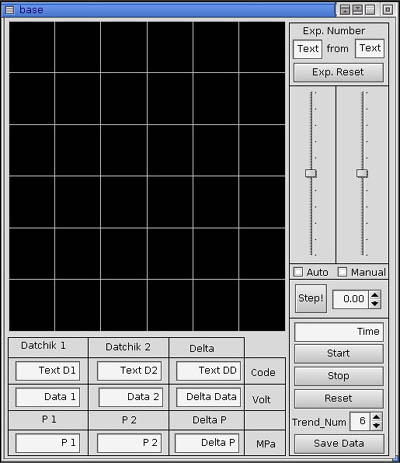
рис. 4 |
Программа позволяет осуществлять управление гидроприводом в ручном и автоматическом режиме, получать текстовую и графическую информацию о работе привода, записывать результаты (с возможностью воспроизведения в другой программе), а также получать переходные процессы для исследуемого привода.
На данный момент программа в полном объёме не реализована.
Планы на ближайший период
1) Расширить перечень тестовых примеров с учётом специфики объектов применения (ГПС);
2) Реализовать все запланированные возможности в программе Experiment;
3) Расширить демонстрационную часть курса за счёт реализации управления системой приводов покрасочного робота (рис. 5…7).
Работы по п.3 планируется выполнить совместно с 2 – 3 студентами в рамках КНИРС (курсовая научно-исследовательская работа студента).

рис. 5 |
рис. 6 |

рис. 7 |
|