Персональные данные преподавателя и общие сведения о вузе:
- Бойченко Иван Валентинович
- доцент каф. АСУ ТУСУР
- Томский государственный университет систем управления и радиоэлектроники (ТУСУР)
- Факультет систем управления, кафедры: Автоматизированных систем управления, Автоматизации обработки информации
- Веб-страница факультета http://www.tusur.ru/ru/index.php?id=146
- Веб-страница кафедры АСУ http://www.asu.tusur.ru
- Основной e-mail вуза: [email protected]
- 13 сентября 2006г.
Контактная информация:
- Бойченко Иван Валентинович
- доцент каф. АСУ ТУСУР
- 634050 г.Томск, пр.Ленина,40 кафедра АСУ
- e-mail: [email protected]
- тел. (8-3822) 41-31-57
- факс. (8-3822) 41-35-06
Другие преподаватели данного учебного курса:
- Гриценко Юрий Борисович
- доцент каф. АОИ ТУСУР
- e-mail: [email protected]
- тел. (8-3822) 414-470
Описание учебного курса: Оборудование используется в рамках учебно-исследовательской работы студента (УИР). Этот вид работ запланирован учебным процессом для студентов 4 и 5 годов обучения.
Создана студенческая лаборатория для УИР в области применения систем реального времени (СРВ) в таких областях как вычислительные сети и робототехника.
В рамках направления «ОСРВ в вычислительных сетях» с 2005г. разрабатывается система маршрутизации, балансировки нагрузки, и учета сетевого трафика под управлением ОСРВ QNX.
Новым направлением с 2006 года является создание программного обеспечения для систем доставки содержимого. Главная функция такой системы - хранить большие массивы видео- и аудио-информации и обеспечивать получение содержимого по запросу в реальном режиме времени. Кроме того, должны обеспечиваться сервисные функции поиска файлов по различным критериям, в том числе по содержимому, и быстрого просмотра выборочных отрывков. Предполагается, что возможности систем реального времени позволят четко разграничить вычислительные ресурсы между множеством асинхронных процессов, и осуществить балансировку нагрузки при экспоненциально возрастающем (ударном) количестве запросов пользователей.
Скорость передачи данных в современных вычислительных сетях масштаба города (Metropolitan Area Networks) составляет несколько гигабит/с, что является главной предпосылкой для создания систем доставки содержимого, предъявляющих высокие требования, как к объему данных, так и ко времени доставки.
Для решения этих и сопутствующих им задач выбрано аппаратное обеспечение, предоставленное по программе «QNX для ВУЗов» - Performance Communication Appliance (Intel® Pentium® M) WINMB-06032 Pentium M E7501 (см. фото 1) В настоящее время разрабатывается программное обеспечение для систем доставки содержимого.

Фото 1. Серверы распределенной системы доставки содержимого на базе комплекта Performance Communication Appliance WINMB-06032.
В рамках направления «ОСРВ в робототехнике» разрабатывается транспортный робот, а также система управления промышленным роботом-манипулятором.
Основная цель этого направления отработка алгоритмов управления ТР, а также определение потребностей в вычислительных ресурсах при выполнении различного рода задач в реальном режиме времени: нахождение и контроль маршрута, техническое зрение, передача видеоизображения и т.д. Рассматриваются два варианта: 1) управляющая система является стационарной и все управляющие воздействия осуществляются по радио (радиомодем, или собственный пульт дистанционного управления сопряженный с контроллером), 2) полностью автономная система, когда компьютер установлен на борту ТР. Компактность модели Intel® 440MX Entry-level Communications Appliance WINMB-06014, обусловила выбор этой модели для создания автономной системы (см. фото 2). В качестве шасси выбрана радиоуправляемая игрушка, как наиболее простой вариант, вполне подходящий для начального этапа исследований.
В настоящее время разработана схема контроллера (рисунок 3) радиоуправляемого шасси, вторым этапом, будет обеспечение подсистемы передачи информации датчиков и видео, размещенных на шасси, в режиме реального времени. Параллельно разрабатывается программное обеспечение для реализации управления.

Фото 2. Система управления транспортным роботом на базе Intel® 440MX Entry-level Communications Appliance WINMB-06014. В качестве шасси ТР выбрана радиоуправляемая игрушка.
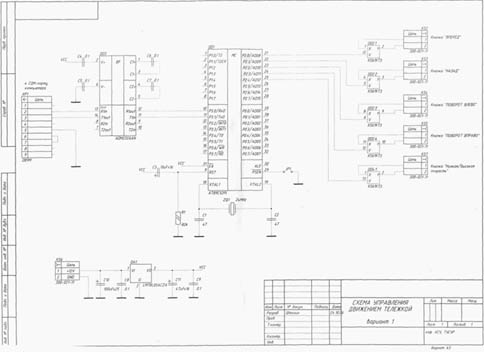
Рисунок 3. Схема контроллера радиоуправляемого шасси.
|

