13.12.2011 Молодые ученые Сибирского федерального университета использовали ОСРВ QNX Neutrino в системе управления БПЛА «Дельта» С 2010 года в Сибирском федеральном университете (г. Красноярск) реализуется проект по созданию беспилотных летательных аппаратов (БПЛА) для решения задач дистанционного зондирования земли (ДЗЗ). Работа ведётся при поддержке Красноярского краевого фонда поддержки научной и научно-технической деятельности. К середине 2011 года молодёжным коллективом был разработан, произведён и испытан БПЛА «Дельта», бортовой комплекс управления которым реализован на базе операционной системы реального времени QNX Neutrino.

Рис.1 Взлет БПЛА с катапульты
|

Рис.2 Штатная парашютная посадка
|
Основные задачи БПЛА «Дельта» — это аэрофотосъёмочные работы с целью составления ортофотопланов, а также визуальное наблюдение в режиме реального времени. Комплекс может быть использован для контроля за состоянием лесных и сельскохозяйственных угодий, для мониторинга снеговой, гидрологической обстановки, контроля за ведением дорожных и горных работ.
Отличительная черта комплекса — полностью автоматическая предстартовая и полётная самодиагностика, а также то, что он был полностью, от определения конструкции до изготовления механических устройств и электронного оборудования, создан силами студентов и аспирантов СФУ.
Комплекс управления БПЛА «Дельта» состоит из бортового и наземного сегмента: бортового комплекса управления (БКУ) и наземного комплекса управления (НКУ). Основными задачами бортового комплекса управления являются: навигация, самолетовождение, автоматический взлет и посадка, обеспечение командно-телеметрического канала, управление полезной нагрузкой и самодиагностика.
При разработке БКУ основные приоритеты отдавались надёжности и эргономике комплекса. Для конкурентоспособной реализации данных критериев необходимо было обеспечивать непрерывную самодиагностику как при подготовке, так и в процессе полета.
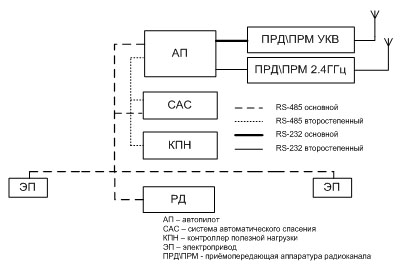
Рис. 3 - Структурная схема БКУ БПЛА Дельта.
Центральным элементом БКУ (рис.3) является блок автопилота (АП), централизованный на базе вычислителя архитектуры ARM9. В состав блока включены датчики и системы для решения навигационной задачи: микромеханическая инерциальная навигационная система (МИНС), приёмник спутниковых навигационных сигналов (СНС), а также датчики измерения давления (система воздушных сигналов - СВС).
Для управления блоком автопилота, а также всем комплексом управления была выбрана операционная система реального времени (ОСРВ) QNX Neutrino. Основными критериями, определившими выбор ОС, являлись:
- доступность среды разработки для исследовательских задач;
- доступность BSP;
- минимальное время отклика на аппаратные и программные сигналы;
- обеспечение защищённого режима (виртуализация адресного пространства);
- микроядерная масштабируемая архитектура;
- простота программирования;
- качественная документация;
Программное обеспечение блока АП согласно решаемым задачам БКУ разделено на следующие модули: модуль навигации, модуль связи, модуль управления, модуль взаимодействия с периферией по RS-485 (рис. 4).
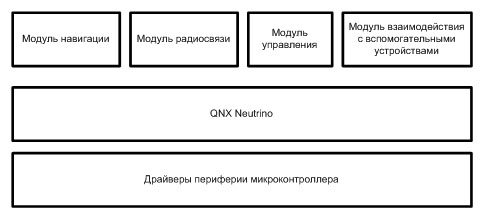
Рис. 4 - Структурная схема программного обеспечения блока автопилота на базе QNX Neutrino.
На рисунке 5 представлена структура модуля навигации. При лётной работе навигационные вычисления занимают 20% процессорного времени, 10% занимают оставшиеся модули и драйверы. Навигационный модуль является начальным при формировании управляющего решения на сервоприводы и двигатель. В реализации автоматизированной системы управления активно применяются потоки, прежде всего для упрощения программного обеспечения. Не смотря на издержки на межпроцессное взаимодействие, по данным экспериментов, «дрожание» периода прохождения выходного сигнала гарантированно составляет 1-2 мс на протяжении всего полёта. Физически САУ БПЛА работает в диапазоне входного воздействия 0-5Гц. Частота выдачи навигационного решения и управляющего решения составляет 50Гц.
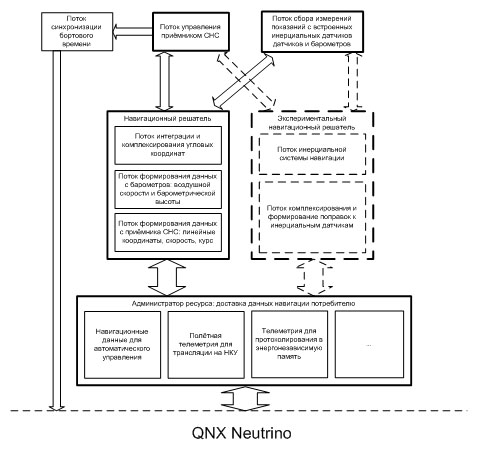
Рис. 5 – Структурная схема модуля навигации.
Активная лётная испытательная работа была начата в конце февраля 2011 года, за 5 месяцев время общий налёт комплекса составил более 150 часов. На рис. 6 представлен ортофотоплан угольного разреза Бородинский (Красноярский край), полученный в результате сшивки 266 изображений, сделанных БПЛА «Дельта» во время одного 40-минутного полета на высоте 1000 метров.

Рис. 6 – Ортофотоплан угольного разреза Бородинский (Красноярский край).
В настоящее время коллектив молодых ученых работает над созданием нового самолета БПЛА «Гамма». Размах его крыльев будет равен 4 метрам, вес машины составит уже около 50 килограммов, масса полезной нагрузки будет увеличена до 8 килограмм, а продолжительность полета до 8 часов. Первые полеты БПЛА «Гамма» запланированы на начало 2012 года.
Более подробная информация о проекте:
Макаров Иван Владимирович
[email protected]
|
